by William W. Menasco

I first meet Joan Birman in the Fall of 1985. I had been at the University at Buffalo as an assistant professor for one year. Its mathematics department had a laudable history of research in classical point set topology and foundations. But, my hire showed the department’s interest in expanding into geometric topology. With this in mind and knowing of Joan’s work in low dimensional topology and braids, I invited her up to Buffalo to give the department’s colloquium. Although it was a short visit we managed to talk a good deal of mathematics and Joan gave me a peek into the large world of braids. She told me of the Jones’ conjecture — I would end up pursuing it for the next \( 20+ \) years. Simply stated, the conjecture claims that the algebraic length of a minimal index closed braid representative of an oriented knot is an invariant of the knot. Dropping her off at the airport, Joan said “maybe we can do some work together”. Famous last words. We went on to co-author 13 papers and two more manuscripts where we were joined by additional collaborators.

After our initial meeting, we were in steady communication for a number of months. This was before the advent of email, so we talked on the phone a good deal and used snail-mail. Additionally, we started racking up the frequent flier miles, me going down to New Rochelle to stay at the Birman household, and Joan coming up to Buffalo and staying at my home. Our visits were filled with math, cooking and conversation over family meals. I became good friends with Joe, Joan’s husband, and Joan saw my wife, Melissa, and me raise our two boys, Timothy and Ryan.
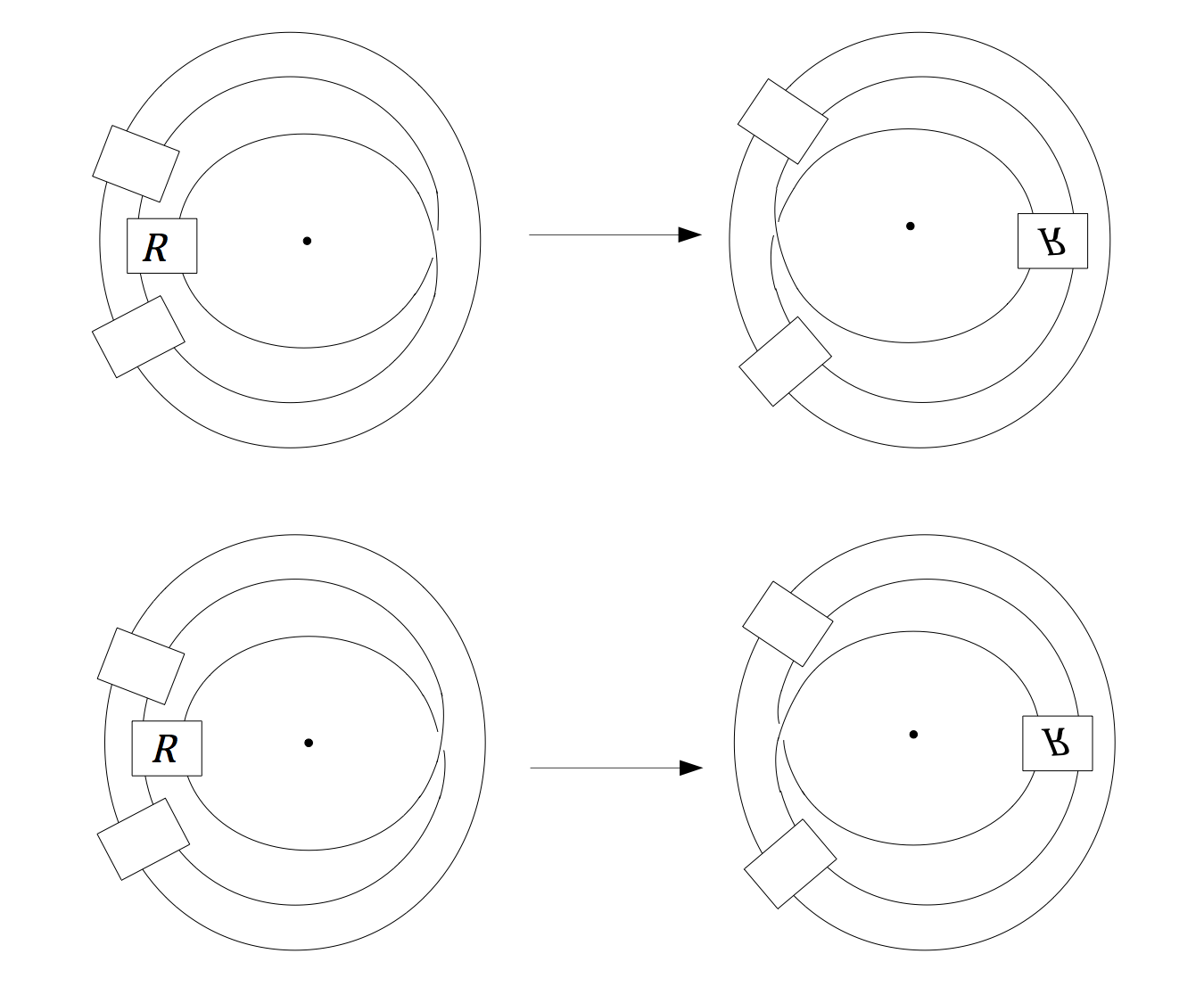
Early in our discussions I asked Joan if she had a big “dream” conjecture. Her reply was that she hoped to be able to use closed braids in solving the knot classification problem — a simple version of this is, give an effective algorithm for determining when two knots in \( S^3 \) are isotopic. Garside’s solution to the conjugacy problem supplied the means for deciding when two \( n \)-braids were in the same conjugacy class; that is, when one given \( n \)-braid is isotopic in the complement of its braid axis to a another given \( n \)-braid. Markov’s theorem told us that two closed braid representatives of the same knot type are isotopic through a sequence of stabilizations, destabilizations and braid isotopies. Markov’s theorem had been essential to Vaughn Jones’ proof that his knot polynomial was a knot invariant. But, stabilization-destabilization sequences were a “black box”. What did stabilization buy you? In one of Joan’s earliest letters to me she wrote: “In my book, page-100, example 2-27, you’ll find a sequence of moves which realize an exchange by going up [in index] once and then down [in index] again.” [1] This one example, which I think was originally due to Jim Van Buskirk, was the basis for Joan’s hunch that there existed a closed braid calculus — a set of “canned isotopies” that allowed one to move between closed braid conjugacy class representatives of the same knot type without having to stabilize. Joan’s page-100 exchange move was just one such canned isotopy. (See the next figure. See [4] for a full discussion of the calculus.) Joan’s focus on this one example illustrates a quality that I have always recognized and appreciated. She has a eye for where the mathematics is and where it should go.
This idea of canned isotopies seemed reasonable to me. My doctoral thesis had been on incompressible surfaces in the complement of alternating knots and I had Tait’s flyping conjecture on the brain for some time. Working out some low index examples we quickly realized that the calculus for 3-braids had to be just braid preserving flypes. But, the problem with all mathematics is how to turn a had into a proof. It took us some time to develop traction. By the summer of 1986, we thought we had some results that we were going to present at a UC Santa Cruz braid conference, but we found a fatal flaw in our argument at the last minute and had to cancel.
Finally, in 1987 we started to make some substantial headway. Using basic general position arguments we considered a spanning surface of a closed braid and its intersection with disc fibers of the braid foliation. Positioning the spanning surface so that it is transverse to the braid axis and all but finitely many disc fibers, one obtains a singular foliation on the spanning surface that looks like the union of four-sided tiles, each tile containing a saddle-point where the surface and a disc fiber intersect nontransversely. The vertices (or corners) of these tiles were where the surface was punctured by the braid axis. There were natural parity assignments to each tile and each vertex. With all of this combinatorial information the question was how to see when a braid admitted a possible canned isotopy. We realized that the singular foliation had natural local manipulations that corresponded to braid isotopies, stabilizations, destabilizations, and exchange moves. We also realized that we had stumbled onto technology that was essentially what Daniel Bennequin had developed in his seminal work on braids and contact geometry [e1], the one difference being his singular foliation was induced by the standard contact plane field in \( \mathbb{R}^3 \).
One key observation that Joan made was the tiling nature of the singular foliation yielded an Euler characteristic equation which determined when an exchange move or destabilization must occur. With the singular foliation and this Euler characteristic equation in hand we cranked out a “Studying links via closed braids” series of papers [5], [3], [4], [7]. Specifically, we established that if at a fix braid index a link type has infinitely many distinct closed braid representative isotopy classes then all but finitely many of them were related by exchange moves. For closed braid representative of the \( k \)-component unlink we established that through a sequence of braid isotopies, destabilizations and exchange moves, one could obtain the \( k \)-braid unlink. In [2] we replaced the spanning surface with an \( S^2 \) illustrating that the link was a split or composite link. Specializing the singular foliation and Euler equation to this surface we again established that all that was needed for moving from an arbitrary closed braid representative to one where the links decomposing component were readily visible were braid isotopies and exchange moves. This pattern of exchange moves being the primary simplifying canned isotopy held where we replace \( S^2 \) with an essential torus in the link complement [9].
Since then several scholars have modeled their investigations on this strategy of having a surface tiling structure powered by a Birman-M Euler characteristic equation. Both Peter Cromwell [e2] and Ivan Dynnikov [e8] used this strategy in their works on arc presentations of knots. Tetsuya Ito employed the tiling/Euler-equation combo his very beautiful work which made connections between the braid group orderability and essential surfaces in the knot complement [e11], [e10], [e14]. And, I will mention others shortly.
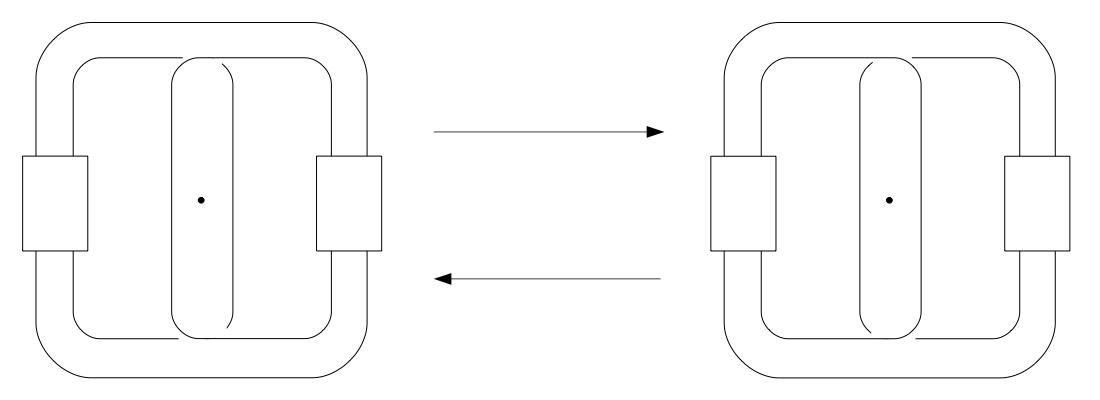
In our paper on 3-braids [8] we finally came back to establishing the closed braid calculus for oriented links represented by closed 3-braids. We were interested in proving what we realized from the start of our work, that calculus for 3-braids had to be just braid preserving flypes. In fact, there are two types of braid preserving flypes — positive flypes and negative flypes. This fact would become important later when we started to think about applications of our work to knot theory in the contact geometry setting. What allowed us to classify closed 3-braids was an observation that was made originally by D. Bennequin — a minimal genus spanning surface of 3-braid intersects any 3-braid axis exactly three times [e8], [3]. Our argument then focused on an analysis of how two axes representing distinct 3-braid conjugacy classes could possibly intersect the same minimal genus spanning surface. The upshot is that every closed 3-braid link has either one unique conjugacy class, or two. And, if two then the two classes are related by a braid preserving flype. (See the figure above.) Later Ki-Hyoung Ko and Sang-Jin Lee determined which 3-braids admitted both positive and negative flypes [e4]. This became important for our contact geometry applications, which I will come to momentarily.
The classification of closed 3-braids partially opened the stabilization black box. The 3-braid preserving flype corresponded to a fixed stabilization sequence — stabilize positively (resp. negatively), followed by a particular 4-braid isotopy, followed by a positive (resp. negative) destabilization for a positive (resp. negative) flype. (See [10] for sequence.) So the closed 3-braid calculus was finite — one canned isotopy, or one template. By 2002 we thought we were ready to write down the details of the Markov Theorem without Stabilization (MTWS), which states the following. Let \( (m,n) \) be any pair of positive integers with \( 0 < n < m \). Let \( \beta_1 \) and \( \beta_2 \) be closed braid representative of the same link type with the braid index of \( \beta_1 \) being \( m \) and the braid index of \( \beta_2 \) being \( n \) which is minimal for the link type. Then there exists a finite collection of isotopy templates depending only on \( (m,n) \) which can be used in an isotopy sequence of closed braid that move \( \beta_1 \) to \( \beta_2 \). And, here is the kicker, the braid index of this sequence is nonincreasing [6]. The proof of the MTWS was a detailed analysis of a very simple proof of the Markov Theorem that we put forward in a short paper [11]. The salient new technology that we introduced in this paper was the clasp annulus — annuli that correspond to an isotopy between boundaries but which also has clasp self-intersections.
The most immediate application of the MTWS was to contact geometry and knot theory. A contact structure on a smooth 3-manifold is a smooth 2-plane field in the tangent bundle that is completely nonintegrability. The standard contact structure for \( {\mathbb R}^3 \) corresponds to the kernel of the 1-form, \( \alpha = d z + r^2 d \theta \), in cylindrical coordinates and the standard contact structure for \( S^3 \) can be seen as the plane field that is normal to the Hopf fibration of \( S^3 \) by \( S^1 \)’s. We incorporate contact structures into knot theory by considering knots that are either totally transverse to the contact plane field — transverse links — or totally tangent to the plane field — Legendrian links — and isotopies that preserve these qualities. Daniel Bennequin in his seminal work [e1] showed that every transverse link was transversely isotopic to a braid representative. An immediate invariant of a transversal knot class is the self linking number. It was immediately clear to Joan and me that the isotopy template coming from the MTWS could either correspond to a transversal isotopy or not. A necessary condition of a template to be transverse was that it must preserve the self linking number. For example, Yakov Eliashberg in 1998 had established that the transversal classes of the unknot were classified by the self linking number. He had speculated in conversation to Joan that knot type plus self linking number was all that was needed to classify transverse isotopy classes of knots. Then Joan showed him 3-braids that admitted a negative flype, and Eliashberg agreed with us that any 3-braid that admits only a negative flype had to have (two) distinct transverse isotopy classes with the same self linking number; that is, such 3-braids were not transversally simple. After establishing the MTWS, we were able to adapt our technology to make this had into a proof [12].
A few additional remarks are of interest. First, in [10] Joan and Nancy Wrinkle showed that positive stabilizations, exchange moves and positive braid preserving flypes were transverse isotopies. (Negative stabilizations alter the self linking number so they cannot be transverse isotopies.) Second, since there was a large community of contact geometers working with Floer homology in an effort to produce transverse and Legendrian knot invariants, Joan thought it would be a good idea to produce a table of low crossing 3-braids which were not transversally simply [14]. Recent work of Lenhard Ng, Peter Ozsváth and Dylan Thurston [e9] has established that certain closed braids admitting a negative flype can be distinguished by such Floer homology invariants, but the 3-braids of this table are still resistant to such invariants.
In 2012 the validity of the Jones’ conjecture was finally established, first by Dynnikov and Prasolov [e12] using further innovations of the singular foliation technology in the arc presentation setting, and then by Doug Lafountain and myself [e13] using further innovations of clasp annuli setting. Both approaches use an Euler characteristic formula coming from a singular foliation tiling.
I have heard it said that a successful career in mathematics is at least two good ideas. From her initial landmark book “Braids, links, and mapping class groups”, to her work on the Jones’ polynomial, to her work on the Vassiliev’s invariants, to her work with me on singular foliations, and more, I would say that a distinguished career comes from having a eye for where the mathematics is and where it should go.
