by Stephen Bigelow
Context
Jones defined planar algebras in the 1990s [3]. In “The annular structure of subfactors” [6], he explains that the definition of planar algebras grew out of an attempt to solve the massive systems of linear equations that define the standard invariant of certain subfactors. Since then, they have provided a radically new diagrammatic approach to subfactors.
Jones’ breakthrough paper “Index of subfactors” [1] can be seen in retrospect as an application of diagrammatic algebra to subfactors. However the diagrammatic approach to the Temperley–Lieb algebra was only introduced later by Kauffman [e1]. The first use of truly diagrammatic methods to subfactors was [4], which gave certain conditions under which a subfactor has an intermediate subfactor.
The paper “The annular structure of subfactors” is mostly about \( ATL(\delta) \), the annular Temperley–Lieb algebroid, which captures the simplest part of the algebraic structure of a planar algebra. Jones uses this approach to give a new proof of the existence and uniqueness of the \( E_6 \) and \( E_8 \) subfactors, which are the most interesting subfactors of index less than 4. The same basic method was later used to prove the existence of the extended Haagerup subfactor, and continues to be used to construct and study new subfactors.
Planar algebras and annular tangles
Factors are the building blocks of von Neumann algebras. Any nonzero morphism between factors must be an embedding, so the study of factors naturally leads to the study of subfactors. Most of the focus has been on subfactors of type II\( _1 \) factors, which seem to be the most interesting type in the classification given by Murray and von Neumann.
A subfactor of a type II\( _1 \) factor has three important invariants: the index is a number \( \delta^2 > 0 \), the principal graph is a bipartite multigraph, and the standard invariant is a pair of nested sequences of algebras. Popa [e5] gave a list of axioms that characterize the standard invariant. Jones gave an alternative axiomatization in terms of planar algebras.
It takes some time and care to define planar algebras rigorously, but the basic idea is not so difficult. A planar algebra consists of a sequence of vector spaces \( P_n \), together with a multilinear action of planar tangles. A planar tangle is a diagram consisting of disjoint curves, or “strands”, drawn in a disk with holes. Usually, the vectors in the planar algebra are formal linear combinations of some kind of diagrams drawn in a disk, and a planar tangle acts on diagrams by gluing the diagrams into the holes. Every boundary circle comes with a special distinguished region, which determines the correct orientation for gluing.
We briefly mention two of the technical details in the definition of a planar algebra. First, each vector space \( P_n \) comes with a conjugate-linear “star” operation, which commutes with the reflection operation on planar tangles. This gives rise to an inner product, which must be positive definite. Second, a planar tangle comes with a checkerboard shading of the regions between strands, alternating between shaded and unshaded regions. Due to the shading, there are actually two vector spaces \( P_+ \) and \( P_- \) in place of \( P_0 \).
An annular tangle is a planar tangle with only one input. In other words, it is a Temperley–Lieb diagram drawn in an annulus. An annular \( (m,k) \)-tangle is an annular tangle that has \( 2k \) marked points on the inner circle and \( 2m \) on the outer.
The annular Temperley–Lieb algebroid \( ATL(\delta) \) consists of formal linear combinations of annular \( (m,k) \)-tangles. If an annular tangle has a closed loop that does not go around the central hole, then that loop can be deleted in exchange for multiplying by the parameter \( \delta > 0 \). Multiplication in \( ATL(\delta) \) comes from the operation of placing one annular tangle inside the hole of another.
Every subfactor planar algebra is a module over \( ATL(\delta) \), where \( \delta \) is the index of the subfactor. Most of “The annular structure of subfactors” is concerned with analyzing modules over \( ATL(\delta) \), and drawing conclusions about subfactors.
Jones completely classifies the Hilbert \( TL(\delta) \)-modules in the case \( \delta > 2 \). Just knowing the possible dimensions of Hilbert \( TL(\delta) \)-modules is enough to prove that some graphs cannot be the principal graph of a subfactor. Jones gives some examples of this, including results previously proved in [3] and [e4].
The case \( \delta < 2 \) requires special treatment. Jones gives some results in specific cases that will be needed for the \( E_6 \) and \( E_8 \) subfactors. A more extensive study is postponed to a later paper with Reznikoff [7].
The study of \( ATL(\delta) \) is an example of the diagrammatic approach providing not just a new way to prove theorems, but a new idea of what questions to ask. The action of annular planar tangles is a natural choice of the “simplest” part of the algebraic structure of a planar algebra, leading to a direction of investigation might not seem so natural otherwise.
Construction of \( E_6 \) and \( E_8 \) subfactors
The subfactors with principal graphs \( E_6 \) and \( E_8 \) are the most interesting of the \( ADE \) classification of subfactors of index less than 4. They were first constructed in [e2] and [e3]. Jones gives an alternative, diagrammatic construction. Since they are finite depth, it is easy to construct the subfactor from its corresponding planar algebra.
Most of the focus is on the more complicated \( E_8 \) planar algebra, which we will call \( P \). Jones ultimately obtains a presentation for \( P \) with one generator \( \psi \in P_5 \), and five relations listed in ([6], Appendix B). This presentation is at first an educated guess. Start by assuming that \( P \) is the subfactor planar algebra of type \( E_8 \). Then the dimension of \( P_n \) is the number of paths of length \( 2n \) in the \( E_8 \) graph that start and end at the vertex farthest from the trivalent vertex. We can deduce the existence of \( \psi \in P_5 \) that is perpendicular to the Temperley–Lieb algebra \( TL_5 \). We can then find relations that \( \psi \) must satisfy using further dimension arguments and positive definiteness.
Once we have defined \( P \), the main task is to prove that the relations are powerful enough to make \( P \) finite-dimensional, but not so powerful as to make it trivial. This is a common problem. As Jones says: “Probably any set of skein relations causing collapse to finite dimensions (but not to zero) should be considered interesting.”
To prove that the dimension of \( P \) is not trivial, Jones finds a copy of \( P \) inside the graph planar algebra \( P^{E_8} \), as defined in [5]. We could compare this situation to the problem of proving the nontriviality of a group given by generators and relations. One way to do this is to find a nontrivial homomorphism to a general linear group. The graph planar algebra plays the role of the general linear group. This method is widely applicable, since every subfactor embeds in the graph planar algebra of its principal graph [8].
Instead of proving that every \( P_n \) is finite-dimensional, it suffices to prove to prove that \( P_\pm \) has dimension one. The fact that \( P \) is the subfactor planar algebra with principal graph \( E_8 \) then follows from a process of elimination. This is due to what Jones calls “the paucity of graphs with norms less than 2”.
A diagram in \( P_\pm \) is called a closed diagram. Jones describes an evaluation algorithm, which uses the relations to reduce an arbitrary closed diagram to a scalar multiple of the empty diagram. In keeping with the theme of the paper, the two most important relations are relations between annular tangles applied to \( \psi \).
The first relation is that any annular \( (4,5) \)-tangle applied to \( \psi \) gives zero. Nowadays we would say \( \psi \) is uncappable, meaning that a diagram is zero if any strand forms a “cap” connecting two points on the same copy of \( \psi \).
The second relation comes from Lemma 8.1, and says that a certain linear combination \( v \) of annular \( (6,5) \)-tangles applied to \( \psi \) is 0. We call this a braiding relation, since it says a strand can slide over (but not under) a generator, where we allow diagrams that contain crossings, which can be resolved by the usual Kauffman skein relation. The braiding relation is shown in Figure 1, where \( \psi \) is a circle, and we have omitted the distinguished regions, the shading, and the coefficients in the linear combination.
Jones uses the braiding relation by applying it inside a larger diagram that has two copies of \( \psi \). Repeatedly doing this, he is able to show that two copies of \( \psi \) that are connected by two or more parallel strands can be written as a linear combination of diagrams that have only fewer copies of \( \psi \).
By an Euler characteristic argument, any nonempty closed diagram has either a strand that forms a closed loop, a cap attached to a copy of \( \psi \), or two parallel strands connecting two copies of \( \psi \). The closed loop can be deleted, the cap makes the diagram zero, and the third case can be written as a linear combination of diagrams that have fewer copies of \( \psi \). We can repeat this process until we simplify down to a scalar multiple of the empty diagram.
The jellyfish algorithm
With his construction of the \( E_6 \) and \( E_8 \) planar algebras, Jones laid out the template for what is sometimes called the skein theoretic approach to defining a subfactor. The same approach was used in [e7] to construct, and thoroughly analyze, the \( D_{2n} \) planar algebra. The first new subfactor constructed in this way was the extended Haagerup subfactor [e8].
As in the \( E_8 \) case, the \( D_{2n} \) planar algebra is defined by a single uncappable generator and a list of relations, including a braiding relation of the same form as Figure 1. The relations are quite simple and powerful, so [e7] give a direct proof that the planar algebra is not trivial, without use the graph planar algebra.
A key observation in [e7] is that you can use the braiding relation to bring any pair of generators to be adjacent. Then there is another relation that lets you simplify the adjacent pair of generators. In this way, they avoid the need for an Euler characteristic argument.
In retrospect, a similar approach would have been possible in the \( E_8 \) case. It is more difficult in that two adjacent generators need to be connected by two strands in order to be simplified. However, if all of the generators are moved to the top of the diagram, then it is not hard to show there must be either a generator connected to itself by a “cup”, or a pair of generators connected by more than two strands. This would eliminate the need for the Euler characteristic argument, which is not necessarily an improvement over Jones’ algorithm, but does provide motivation for the extended Haagerup planar algebra.
As usual, [e8] defines a planar algebra with one generator and a list of relations, and prove it is nontrivial by embedding it in the graph planar algebra of the extended Haagerup graph. This graph planar algebra is too large to analyze as carefully as Jones does in the \( E_6 \) and \( E_8 \) cases. Instead, a computer search is used to find an element that satisfies the defining relations.
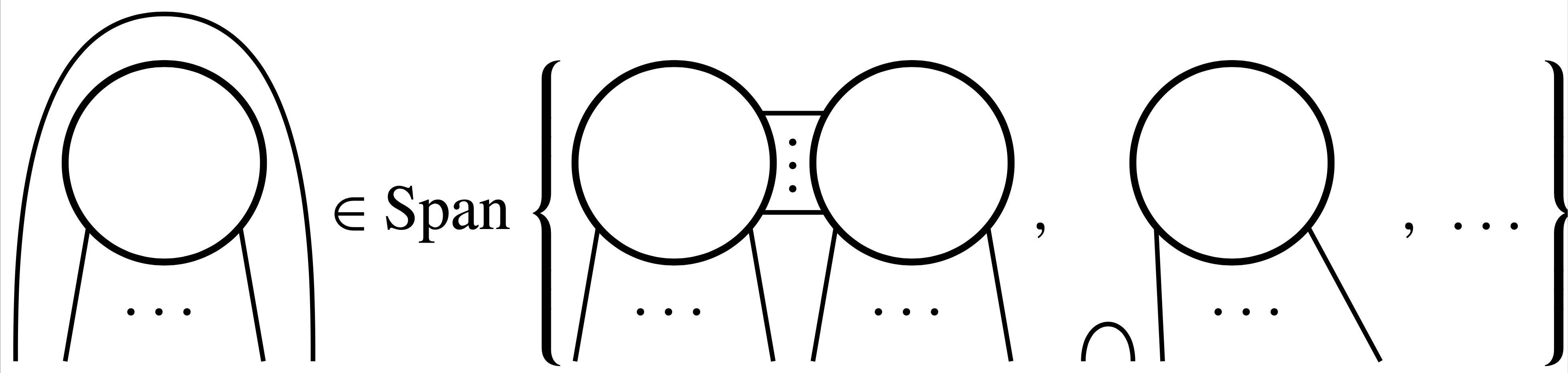
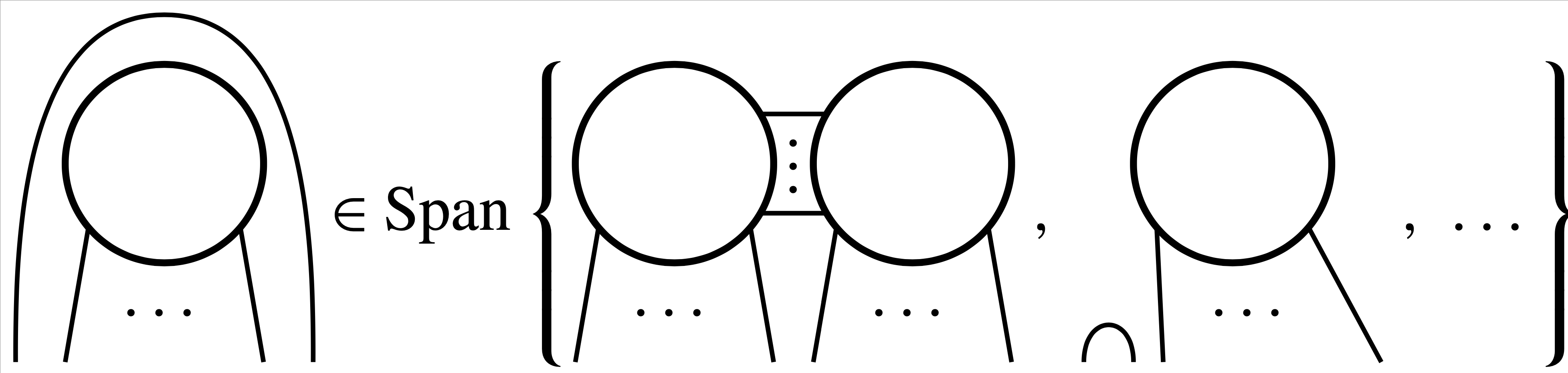
Analogous to the braiding relation, the extended Haagerup planar algebra has two braiding substitute relations. The simpler of the two is of the form shown in Figure 2. Again, the generator is a circle, and we have omitted the distinguished regions, the shading, and the coefficients in the linear combination. We have also cheated with the ellipsis, which hides some terms that are diagrams with no copies of the generator.
Note that one of the terms on the right of the braiding substitute relation has two copies of the generator. However all generators on the right are all closer to the top than the generator on the left. Thus, if we are willing to increase the number of generators in a diagram, we can move them all to the top.
Once we have all of the generators at the top of a closed diagram, we can then start to decrease the number of generators. If a generator is connected to itself by a “cup”, then the diagram is zero. If not, it is not hard to show there must be a pair of generators that are joined by at least half of their strands. Such a pair can be simplified by the quadratic relation. We can repeat this process until there are no generators.
The above evaluation algorithm is called the jellyfish algorithm, since the first stage is reminiscent of jellyfish floating to the top of a tank. The same algorithm has been used to construct other subfactors, for example in [e10]. Conversely, it has been used to place restrictions on the type of graphs that can be principal graphs of subfactors [e9].
